Mechatronics Lab

HBE-Xconvey - Smart Conveyor Training Equipment
Product Features
- AI convergence training equipment to build a smart factory, which has structure for application implementation and provides connectivity
- Simulation environment that is a scaled-down conveyor automatic sorting system to be placed on a table
- Provides HMI with built-in touchscreen to enable sensor and actuator control in GUI environment
- Machine learning-based classification and data processing are experimentally scalable using HMI and AI accelerator
- Low-level and high-level control are possible through MicroPython, Python, Pop plus library
- Precise conveyor belt speed control using DC motor and driver
- Accomplishes sophisticated classification by quickly reading optical sensor-based object detection data
- Supports factory workflow and performance analysis through real-time data dashboard and graph
- Simplifies complex supply and classification operation using servo motor
- Provides a user-friendly interface with GUI designed on PySide6
- Supports ModBus and OPC-UA that can be integrated with PLC
- Practice with real results by detecting and classifying objects on conveyor
- Similar functions can be implemented at lower cost as PLC equipment
- Flexible scalability is provided by actively utilizing open source technologies such as OpenCV and MQTT
- Supports dashboard and remote monitoring through open source IoT platform, analytics and interactive visualization tool
- Monitors sensor data remotely and interworks with cloud collaboration system and internet messenger in case of error
- Can add new sensors and actuators easily through software modularization
Block Diagram
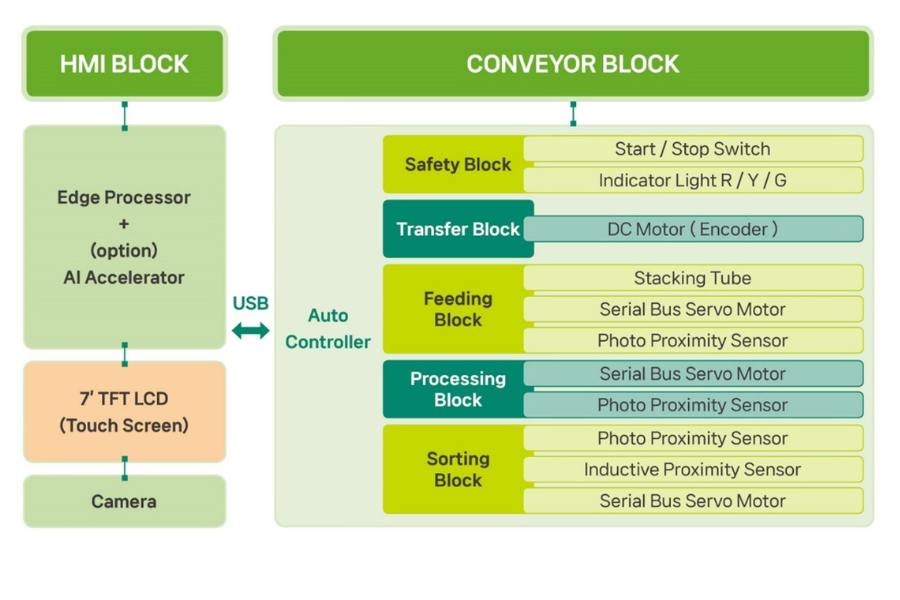
Auto Controller
- Overview and Implementation of Conveyor Belt System
- DC Motor and Motor Driver control
- Conveyor speed control and direction change
- Using Optical Sensor
- Reading sensor signal and processing data
- Control of supplying/processing/sorting device
- Principle and control of servo motor operation
- Firmware Design
- Thread, asynchronous control, protocol
- HMI (Human-Machine Interface)
- Reading sensor signal and processing data
- GUI Design
- Real-time monitoring system implementation
- Sensor data visualization and remote control
- Error detection and alert system implementation
PLC Integrated Technology
- PLC Integrated Technology
• ModBus and Control Application
• OPC-UA and Control Application
- OPC-UA and Control Application
• OpenCV
• Machine Learning
• Classification Algorithm and Data Processing
- Implementing OpenCV-based classification logic
- Scaling machine learning-based classification up
- Cloud Service Integration and Monitoring
• Open Source-based IoT Cloud Integration
- Implementing Cloud Dashboard
- Data Visualization

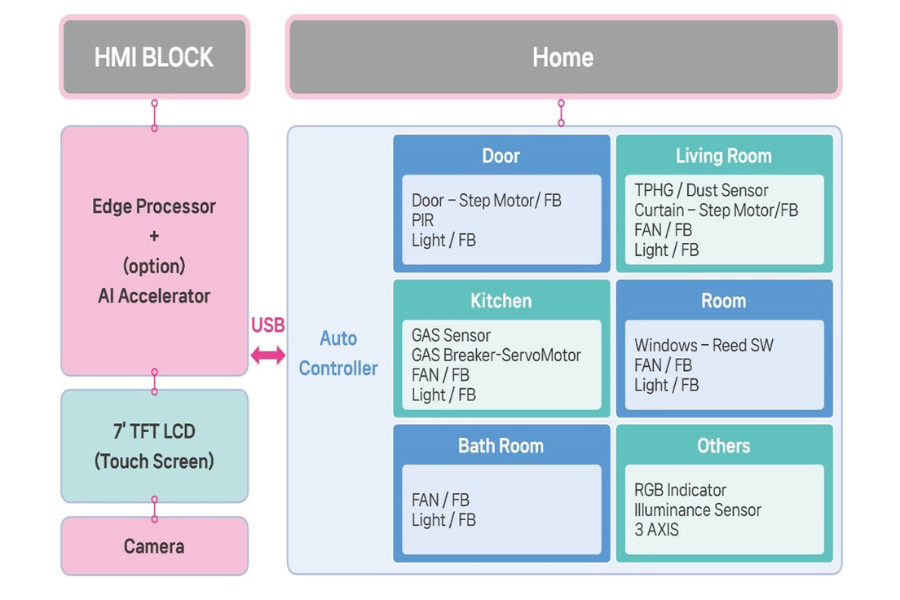
XHOME - Smart Home Automation Training Equipment
- AI convergence training equipment to build a smart for application implementation and provides connectivity
- Simulation environment that is a scaled-down two-story house to be placed on a table
- Provides HMI with built-in touchscreen to enable sensor and actuator control in GUI environment
- Provides automatic controller that controls light, ventilation fan, door, curtain motor and monitors humidity, harmful gas
- Feedback circuit is configured for all actuators enabling feedforward and feedback control
- Supports cloud and smartphone/tablet connectivity
- Supports AI accelerator to scale up machine learning-based smart home automation
- Low-level and high-level control are possible through MicroPython, Python, Pop plus library
- Provides a user-friendly interface with GUI designed on PySide6
- Supports to implement image processing and classification logic using OpenCV and MediaPipe
- Controlling the device remotely via mobile apps such as Blynk.
- Conditional operation that automatically sets the device to run based on specific condition is possible
- Scenario-based control such as away mode and sleep mode
- Supports data communication encryption using SSL/TLS and MQTT
- Supports 2FA user authentication and authorization management
- Supports dashboard and remote monitoring through open source IoT platform, analytics and interactive visualization tool
- Protects sensitive data by encrypting data with AES/KDF
- Supports dashboard and remote monitoring through open source IoT platform, analytics and interactive visualization tool
- Monitors sensor data remotely and supports interworking with cloud collaboration system and internet messenger in case of error.
Block Diagram

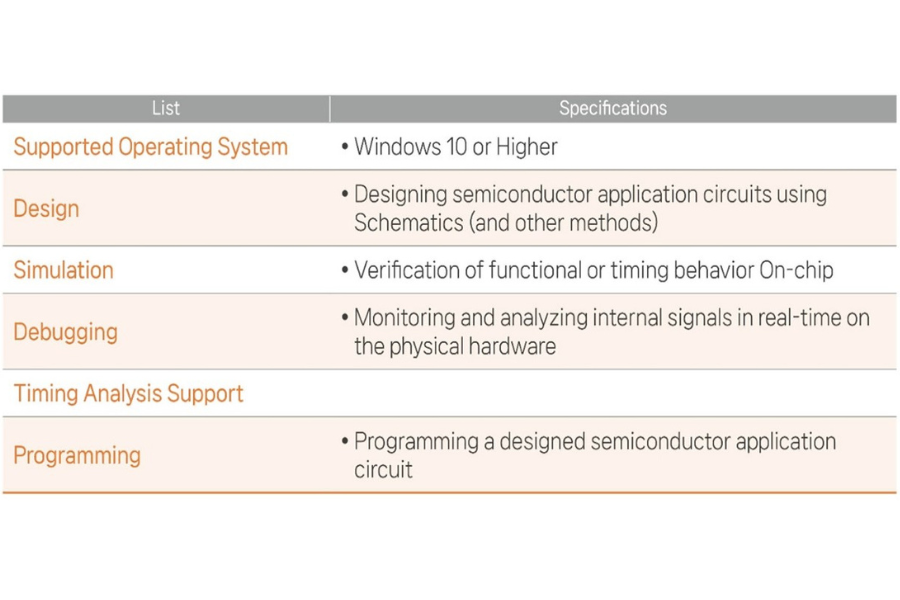
HBE-SACT -Semiconductor Application Circuit
Training Equipment
Hardware Specifications
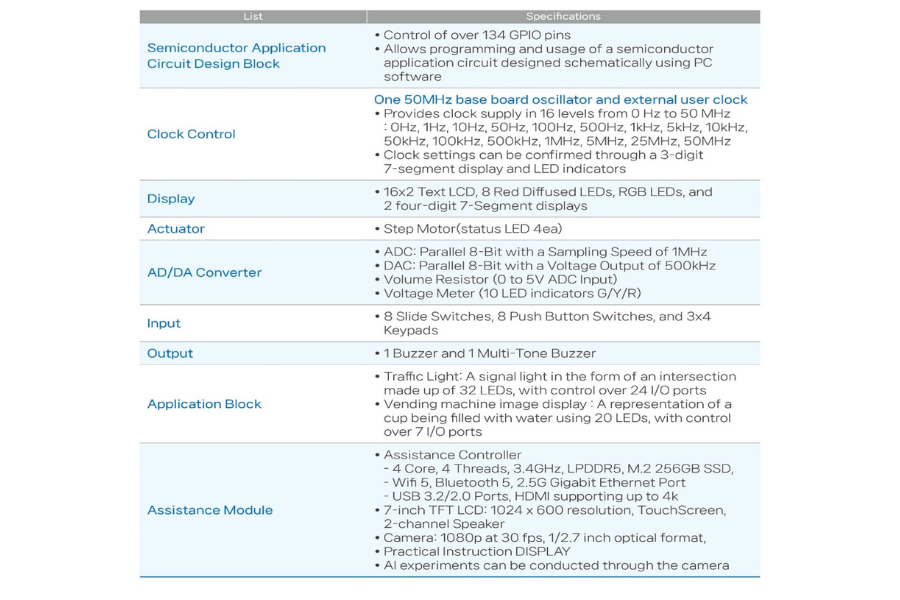
Hardware Specifications
Operating Program
VEX Workcell with VEX code coding software
Workcell Automation
Building on the foundation of the Introduction to the 6-Axis Arm, this course continues through the setup and automation of a complete VEX CTE Workcell. Learn to integrate sensors, conveyors, and pneumatics, and master complex coding concepts to fully automate moving, sorting, and palletizing objects.
Introduction to Workcells
Introduction to the 6-Axis Arm Course. You will expand your knowledge of industrial
robotics to include using the EXP Robot Brain with the 6-Axis Robotic Arm, including coding
with sensors, using conveyors to move objects, and harnessing the power of pneumatics. In
this Unit, you will be introduced to what a work cell, how to gather coordinates using the
Devices Screen on the Brain, and how to code the 6-Axis Arm
VEX Workcell
- Teaching industrial robotics
- STEM
- Python
- C++
- Block-based coding
- VEX Robotics
- Robotic arm
- Educational robotics
In the previous Unit, you learned about how the Optical Sensor reports the hue value and proximity of detected objects, and you coded nested conditional statements to sort Disks by color using the Optical Sensor. In this Unit, you will build on that knowledge by learning about how conveyors are used within the industrial automation industry, the importance of time-based movements, and how the Object Sensor is used to detect the presence of an object.
Understanding Pneumatics
In the previous Unit, you learned how conveyors are used within workcells to efficiently transport objects. You also coded the conveyors to quickly move a Disk through the CTE Workcell, using the Object Sensor to prevent the Disk from falling off. In this Unit, you will expand on that knowledge by exploring how pneumatics is used to move machinery and objects within a workcell.
Pallet Loading Challenge
In this challenge, your team must work together to plan and execute a project to accurately Deliver products from the Disk Feeder to the correct Loading Docks as quickly as possible.
Optical Sorting Challenge
In this challenge, your team must work together to plan and execute a project to accurately Deliver products from the Disk Feeder to the correct Loading Docks as
quickly as possible.
Logistics Sorting Challenge
In this challenge, your team must work together to plan and execute a project to accurately Deliver products from the Disk Feeder and the Pallet to the correct Loading Docks as quickly as possible.
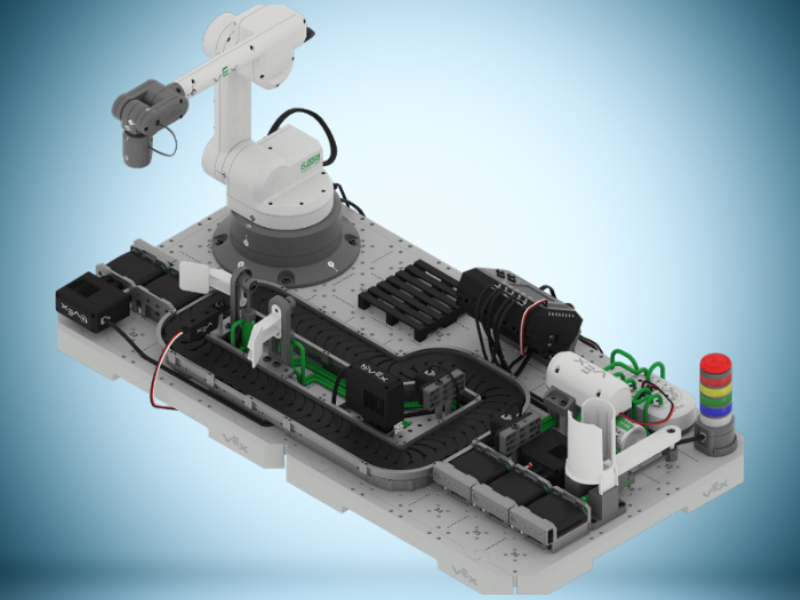
Product Features
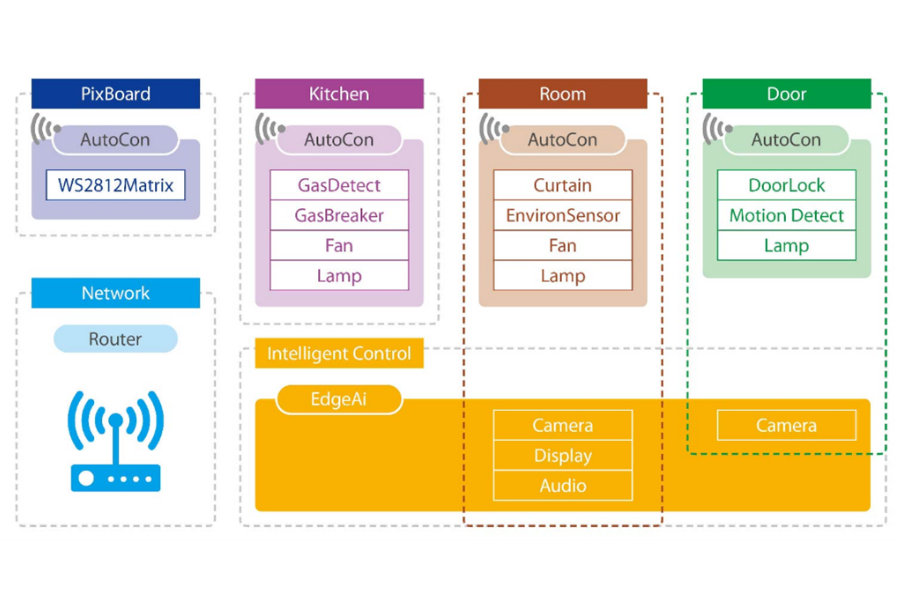
- A Physical AI–based smart home control system training platform, modularized into four zones—Entrance, Room (indoor), Kitchen, and Pixel Board—on a rectangular panel built with large aluminum-profile frames
- Sensors and actuators in each zone are driven by a high-performance MCU, supporting standard interfaces such as I²C/PWM/GPIO and real-time control loops
- An intelligent unified controller equipped with a CUDA-accelerated edge supercomputer supports high-performance inference and multimodal perception/control services
- The intelligent unified controller provides a large touchscreen–based HMI/GUI runtime, enabling easy composition of system monitoring dashboards and control scenarios
- With a camera and digital microphone (array), supports AI human–machine interfaces (HMI) such as vision/audio-based user recognition and command processing
- The high-performance MCU and intelligent unified controller are interconnected over a TCP/IP network via a router; with Internet access, secure remote connectivity and control scenarios can be configured
- Provides the Pop plus library, which controls physical components through a unified API regardless of local or remote deployment (device abstraction, event-subscription I/O)
- Provides an open-source MQTT broker supporting SSL/TLS-based encrypted communication and authentication, with standard QoS and topic-level access control (ACL) configuration
- Provides an integrated Python/MicroPython development environment, including real-time logs/serial console, firmware transfer, and package-management workflows
- Provides integrated Physical AI control examples based on PySide6, DeepStream Perception, and Riva Speech Embedded
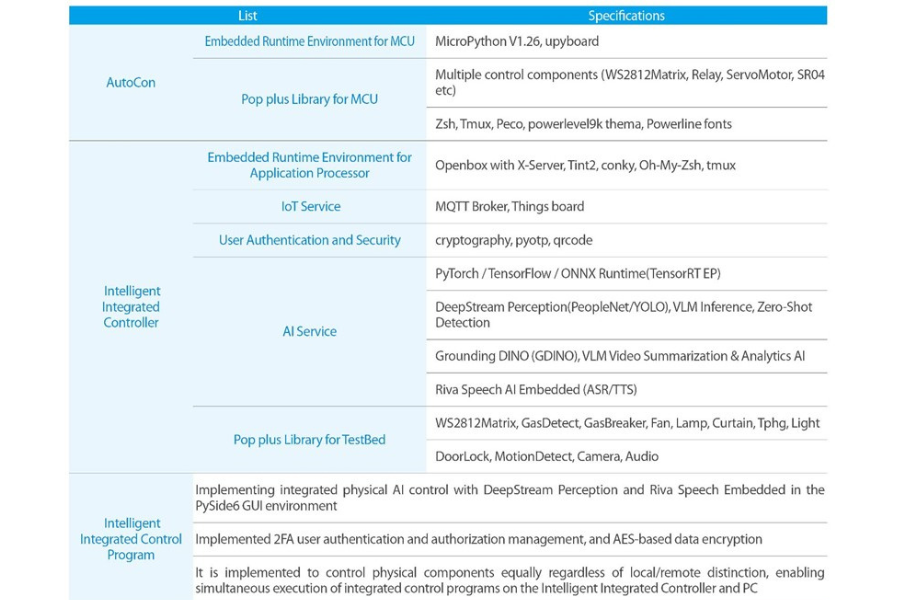
AIOT TestBed Ⅱ

Software Specifications
Block Diagram
Additional applications
- Assembly
- Pick and place
- Material handling
- Packaging
- Kitting/Tray loading
- Machine tending
- Screw driving
- Dispensing
- Palletizing
- Lab analysis and testing
- Inspection and test
- Finishing
- Grinding/Polishing
6 Axis Robot

Software Specifications
- The VT6L Robots can reach up to 900mm and carry a payload of up to 6kg.
SlimLine design
- The Compact wrist pitch enables access to hard-to-reach areas in confined spaces.
Fast, easy integration
- Installs in minutes; requires less time and money for system integration.
Simplified cabling
- The hollow end-of-arm design makes end-of-arm tooling easier than ever.
Application versatility
- Ideal for machine-tool and injection-molding load/unload, pick-and-place, dispensing and simple assembly projects.
Easy to use
- The intuitive and feature-packed Epson RC+ development software makes it easy to create powerful solutions.
Low Power Consumption
- Comes standard with 110V and 220V power
Integrated vision guidance option
- Robot guidance makes it easy to automate simple applications when vision is required.
No battery required for encoder
- Minimizes downtime and reduces overall cost of ownership.